The Curious Case of Convex Functions
The Curious Case of Convex Functions¶
- Most of the introductory courses for Machine Learning cover algorithms like Linear Regression and Logistic Regression with varying degrees of detail.
- The resources are plentiful for grasping the nitty gitties involved. However, I rarely found traditional courses diving into proving the convexity of MSE loss function.
- Most of the online resources often skim through the part where they define the cost function for Regression Algorithms using MSE where the cost function is claimed to be a convex function.
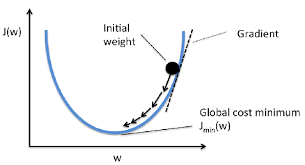
- The convexity property unlocks a crucial advantage where the local minima of a convex function is also a global minima.
- This ensures that a model can be trained where the loss function is minimized to its globally minimum value.
Proving Convexity -¶
- In this blog post, we shall work through the concepts needed to prove the convexity of a function.
- So hang in tight and by the end of this article, you would have a better understanding of -
a. Symmetric Matrices.
b. Hessian Matrices.
c. Positive and Negative Definite/Semidefinite Matrices.
d. Proving convexity of functions.
Without much further ado, let's jump into it.
Basics of Matrices -¶
We shall touch base on some of the basic concepts in Matrices that will help us in proving the convexity of a function. These basics are typically covered in Undergraduate Courses and should sound familiar to you.
1. Square Matrix -
Given a matrix X of dimensions $m \times n$, X is a square matrix iff (if and only if) m = n. In other words, A matrix 'X' is called a square matrix if the number of matrix rows is equal to the number of columns.
$$ \begin{align} X = \begin{bmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \\ 8 & 9 & 10 \end{bmatrix}_{3 \times 3} \end{align} $$In the above example, since the number of rows (m) = number of columns (n), X can be termed as a square matrix.
## basic python imports
import numpy as np
from IPython.core.display import display,HTML
from sklearn.datasets import make_spd_matrix
display(HTML('<style>.prompt{width: 0px; min-width: 0px; visibility: collapse}</style>'))
display(HTML("<style>.container { width:100% !important; }</style>"))
## basic python imports
import numpy as np
from sklearn.datasets import make_spd_matrix
def is_matrix_square(X):
'''
python function for checking whether a matrix is a
square matrix.'''
m, n = X.shape
return m==n
A = np.random.randn(3,3)
B = np.random.randn(4,5)
print("Is Matrix A a Square Matrix: -{0}".format(is_matrix_square(A)))
print("Is Matrix B a Square Matrix -{0}".format(is_matrix_square(B)))
2. Symmetric Matrix -¶
A square matrix 'X' is termed as symmetric if $x_{ij} = x_{ji}$ for all i and j where i, j denotes the ith row and jth column respectively. In other words, X is symmetric if the transpose of X is equal to matrix X.
i.e, $$ \begin{align} X^T = X \end{align} $$
import numpy as np
def is_symmetric(X) -> bool:
if check_square_matrix(X):
return (X.transpose() == X).all()
else:
return False
## pseudo generate a symmetric matrix
base_matrix = np.random.randint(20, size = (3,3))
SA = (base_matrix + base_matrix.T)
print(f"Matrix A - \n {np.matrix(SA)}")
## generate a random matrix
SB = np.random.randint(20, size=(3,3))
print(f"Matrix B - \n {SB}")
SC = np.random.randint(20, size=(2,10))
print(f"Matrix C - \n {SC}")
print(f"is Matrix A Symmetric - {is_symmetric(SA)}")
print(f"is Matrix B Symmetric - {is_symmetric(SB)}")
print(f"is Matrix C Symmetric - {is_symmetric(SC)}")
3. Hermitian Matrix -¶
A square matrix X is self-adjoint or a Hermitian matrix if -
$$ \begin{align} \overline{X^{T}} = X = X^{H} \end{align} $$Note that the terms self-adjoint and Hermitian can be used interchangeably.
def check_hermitian(X):
if check_square_matrix(X):
if (np.conjugate(X.transpose()) == X).all():
return "is a Hermitian Matrix"
else:
return "is not a Hermitian Matrix"
else:
return "is not a Hermitian Matrix since it is not a Square Matrix"
## pseudo generate a symmetric matrix
##generate a random complex matrix with entries between -20 and 10.
base_matrix = np.random.randint(-10, 10, size = (3,3)) + 1j * np.random.randint(-20, 10, size = (3,3))
## trick to force symmetric nature
HA = (base_matrix + np.conjugate(base_matrix.T))
print "Matrix A - \n {0}".format(np.matrix(HA))
## generate a random complex matrix that is not symmetric
HB = np.random.randint(-10, 10, size=(3,3)) + 1j * np.random.randint(-20, 10, size = (3,3))
print "Matrix B - \n {0}".format(HB)
HC = np.random.randint(-10, 10, size=(5,2)) + 1j * np.random.randint(-20, 10, size = (5,2))
print "Matrix C - \n {0}".format(HC)
print("Is Matrix A {0}".format(check_hermitian(HA)))
print("Is Matrix B {0}".format(check_hermitian(HB)))
print("Is Matrix C {0}".format(check_hermitian(HC)))
4. Hessian Matrix -¶
The Hessian of a multivariate function $f(x_1, x_2, ...x_n)$ is a way for organizing second-order partial derivatives in the form of a matrix.
Consider a multivariate function $ f(x_1, x_2, ...x_n) $ then its Hessian can be defined as follows -
$$ \begin{align} H_f = \begin{bmatrix} \frac{\partial ^2 f}{\partial x_1^2} & \frac{\partial^2 f}{\partial x_1 \partial x_2} & \cdots & \frac{\partial ^2 f}{\partial x_1 \partial x_n} \\ \frac{\partial ^2 f}{\partial x_2 \partial x_1} & \frac{\partial^2 f}{\partial {x_2}^2 } & \cdots & \frac{\partial^2 f}{\partial x_2 \partial x_n} \\ \vdots & \ddots & \cdots & \vdots\\ \frac{\partial ^2 f}{\partial x_n \partial x_1} & \frac{\partial^2 f}{\partial x_n \partial x_2 } & \cdots & \frac{\partial^2 f}{\partial {x_n}^2 } \\ \end{bmatrix} \end{align} $$Note that a Hessian matrix by definition is a Square and Symmetric matrix.
5. Positive Definite and Semidefinite Matrices -¶
You may have seen references about these matrices at multiple places but the definition and ways to prove definitiveness remains elusive to many. Let us start with the text definition -
\begin{align} A \; n \times n \; square \; matrix \; X \; is \; Positive \; Definite \; if \;\;\; a^TXa \; > \; 0 \; \forall a \; \in \; \mathbb R^n. \end{align}Similarly,
\begin{align} A \; n \times n \; square \; matrix \; X \; is \; Positive \; Semidefinite \; if \;\; a^TXa \geq 0 \; \forall \; a \in \; \mathbb R^n. \end{align}The same logic can be easily extended to Negative Definite and Negative Semidefinite matrices.
\begin{align} A \; n \times n \; square \; matrix \; X \; is \; Negative \; Definite \; if \;\; a^TXa \; < \; 0 \; \forall a \; \in \; \mathbb R^n. \end{align}And finally,
- However, while checking for Matrix Definiteness, manually validating the condition of every value of x is not an option.
- So let us try and break this down even further.
Eigen Values and Eigen Vector -¶
We know that an eigenvector is a vector whose direction remains unchanged when a linear transformation is applied to it.
Mathematically,
$$ \begin{align} Xa = \lambda a \tag{1} \end{align} $$Where, $\lambda $ represents a scalar called the eigenvalue. This simply means that the linear transformation X on a can be completely defined by $\lambda $.
pre-multiplying eq.(1) by $a^T$ gives -
$$ \begin{align} a^TXa = a^T \lambda a \tag{2} \end{align} $$since $\lambda $ in eq.(2) is a scalar we can write eq.(2) as -
$$
\begin{align}
a^TXa = \lambda a^T a = \lambda <a, a> \tag{3}
\end{align}
$$
where,
$<x, y>$ represent the dot product, $x^Ty$
Analysis¶
- It is easy to see that the dot product of a with $a^T$ will always be positive.
- Referring back to the definition of positive definite matrix and eq(3), $a^TXa$ can be greater than zero if and only if $\lambda$ is greater than zero.
Derived Definition for Matrix Definiteness -¶
Based on pointers mentioned in above Analysis we can tweak the formal definitions of Matrix Definiteness as follows -
- A Symmetric Matrix 'X' is Positive Definite if $\lambda_{i} > \; 0 \;\; \forall i$
- A Symmetric Matrix 'X' is Positive Semi-Definite if $\lambda_{i} \geq \; 0 \;\; \forall i$
- A Symmetric Matrix 'X' is Negative Definite if $\lambda_{i} < \; 0 \;\; \forall i$
- A Symmetric Matrix 'X' is Negative Semi-Definite if $\lambda_{i} \leq \; 0 \;\; \forall i$
def compute_eigen_values(X):
#computing eigen values of a matrix -
eigen_values= np.linalg.eigvals(X)
return eigen_values
def check_definiteness(eigen_values):
if (eigen_values > 0).all():
return "Matrix is Postive Definite as well as Positive Semidefinite"
elif (eigen_values >= 0).all():
return "Matrix is Postive Semi Definite only"
elif (eigen_values < 0).all():
return "Matrix is Negative Definite as well as Negative Semidefinite"
elif (eigen_values <= 0).all():
return "Matrix is Negative SemiDefinite"
else:
return "Matrix is neither Positive Definite nor Negative Definite"
# pseudo generate a Postive semidefinite matrix
base_eig_matrix = make_spd_matrix(3)
EA = base_eig_matrix + base_eig_matrix.transpose()
# test the function
ea_eigen_values = compute_eigen_values(EA)
print(f"Eigen values are {ea_eigen_values}")
print(check_definiteness(ea_eigen_values))
Alternate Definition for Determining Matrix Definiteness -
- Computing Eigenvalues for large matrices often involves solving linear equations.
- Large Matrices involve solving linear equations in a large number of variables.
- Hence, It may not always be feasible to solve for Eigen Values.
An Alternate Theorem for Determining Definiteness of Matrices comes to the rescue -
Theorem -¶
- A Symmetric Matrix 'X' is Positive Definite if $D_k > \; 0 \;\; \forall k$ Where $D_k$ represents the kth Leading Principal Minor.
- A Symmetric Matrix 'X' is Positive Semi-Definite if $\bigtriangleup_k \geq \; 0 \;\; \forall k$ Where $\bigtriangleup_k$ represents the kth Principal Minor.
- A Symmetric Matrix 'X' is Negative Definite if $D_k < \; 0 \;\; \forall k$ Where $D_k$ represents the kth Leading Principal Minor.
- A Symmetric Matrix 'X' is Negative Semi-Definite if $\bigtriangleup_k \leq \; 0 \;\; \forall k$ Where $\bigtriangleup_k$ represents the kth Principal Minor.
Principal Minors of a Matrix -¶
- For a Square Matrix X, a Principal Submatrix of order k is obtained by deleting any (n-k) rows and corresponding (n-k) columns.
- The determinant of such a Principal Submatrix is called the Principal Minor of matrix X.
Leading Principal Minors of a Matrix -¶
- For a Square Matrix X, a Leading Principal Submatrix of order k is obtained by deleting last (n-k) rows and corresponding (n-k) columns.
- The determinant of such a Leading Pricipal Submatrix is called as the Leading Principal Minor of matrix X.
Proving / Checking Convexity of a function -¶
With all the relevant definitions and theorem covered in previous sections, we are now ready to define checks for determining the convexity of functions.
A function f(x) defined over n variables on an open convex set $S$ can be tested for convexity using following criteria -
If $X^H$ is the Hessian Matrix of f(x) then -
- f(x) is strictly convex in $S$ if $X^H$ is a Positive Definite Matrix.
- f(x) is convex in $S$ if $X^H$ is a Positive Semi-Definite Matrix.
- f(x) is strictly concave in $S$ if $X^H$ is a Negative Definite Matrix.
- f(x) is concave in $S$ if $X^H$ is a Negative Semi-Definite Matrix.
Example -¶
Consider an equation of Quadratic form -
$$ \begin{align} f(x_1, x_2, x_3) = 5x_1^2 - 2x_1x_2 + 2x_2^2 + x_3x_2 + x_3^2 \end{align} $$STEP 1 - Computing the Hessian¶
The Hessian of $f(x_1, x_2, x_3)$ can be defined as follows - $$ \begin{align} X^H = \begin{bmatrix} \frac{\partial{f^2}}{\partial{x_1^2}} & \frac{\partial{f^2}}{\partial{x_1x_2}} & \frac{\partial{f^2}}{\partial{x_1x_3}} \\ \frac{\partial{f^2}}{\partial{x_2x_1}} & \frac{\partial{f^2}}{\partial{x_2^2}} & \frac{\partial{f^2}}{\partial{x_2x_3}} \\ \frac{\partial{f^2}}{\partial{x_3x_1}} & \frac{\partial{f^2}}{\partial{x_3x_2}} & \frac{\partial{f^2}}{\partial{x_3^2}} \\ \end{bmatrix} \end{align} $$
\begin{align} \\ \frac{\partial{f^2}}{\partial{x_1^2}} & = \frac{\partial{}}{\partial{x_1^2}}(5x_1^2 - 2x_1x_2 + 2x_2^2 + x_3x_2 + x_3^2) \\ & = \frac{\partial{}}{\partial{x_1}}(10x_1 -2x_2) \\ & = 10 \end{align}Similarly,
\begin{align} \\ \frac{\partial{f^2}}{\partial{x_1x_2}} & = \frac{\partial{}}{\partial{x_1x_2}}(5x_1^2 - 2x_1x_2 + 2x_2^2 + x_3x_2 + x_3^2) \\ & = \frac{\partial{}}{\partial{x_1}}(-2x1 + 4x_2 + 1) \\ & = -2 \\ & = \frac{\partial{f^2}}{\partial{x_2x_1}} \end{align}\begin{align} \\ \frac{\partial{f^2}}{\partial{x_1x_3}} & = \frac{\partial{}}{\partial{x_1x_3}}(5x_1^2 - 2x_1x_2 + 2x_2^2 + x_3x_2 + x_3^2) \\ & = \frac{\partial{}}{\partial{x_1}}(1x_2 + 2x_3) \\ & = 0 \\ & = \frac{\partial{f^2}}{\partial{x_3x_1}} \end{align}\begin{align} \\ \frac{\partial{f^2}}{\partial{x_2^2}} & = \frac{\partial{}}{\partial{x_2^2}}(5x_1^2 - 2x_1x_2 + 2x_2^2 + x_3x_2 + x_3^2) \\ & = \frac{\partial{}}{\partial{x_2}}(-2x_1 + 4x_2 + x_3) \\ & = 4 \end{align}\begin{align} \\ \frac{\partial{f^2}}{\partial{x_2x_3}} & = \frac{\partial{}}{\partial{x_2x_3}}(5x_1^2 - 2x_1x_2 + 2x_2^2 + x_3x_2 + x_3^2) \\ & = \frac{\partial{}}{\partial{x2}}(x_2 + 2x_3) \\ & = 1 \\ & = \frac{\partial{f^2}}{\partial{x_3x_2}} \end{align}\begin{align} \\ \frac{\partial{f^2}}{\partial{x_3^2}} & = \frac{\partial{}}{\partial{x_3^2}}(5x_1^2 - 2x_1x_2 + 2x_2^2 + x_3x_2 + x_3^2) \\ & = \frac{\partial{}}{\partial{x_3}}(x_2 + 2x_3) \\ & = 2 \end{align}$$ \begin{align} X^H = \begin{bmatrix}10 & -2 & 0 \\ -2 & 4 & 1 \\ 0 & 1 & 2\end{bmatrix} \end{align} $$Step 2 - Compute Leading Principal Minors -¶
for k = 3, delete last (3-3) =0 rows and (3-3) = 0 columns $$ \begin{align} \\ D_{k} & = D_{3} \\ &= \begin{vmatrix}10 & -2 & 0 \\ -2 & 4 & 1 \\ 0 & 1 & 2 \\ \end{vmatrix} \\ & = 62 \end{align} $$
for k = 2, delete last (3-2) =1 rows and corresponding (3-2) = 1 columns $$ \begin{align} \\ D_{k} & = D_{2} \\ &= \begin{vmatrix}10 & -2 \\ -2 & 4 \\ \end{vmatrix} \\ & = 36 \end{align} $$
for k = 1, delete last (3-1) =2 rows and corresponding (3-1) = 2 columns $$ \begin{align} \\ D_{k} & = D_{1} \\ & = D_1 \\ &= \begin{vmatrix}10 \\ \end{vmatrix} \\ & = 10 \end{align} $$
Since $D_1 > 0 $, $D_2 >0 $ and $D_3 > 0$, Hessian of $f(x_1, x_2, x_3)$ is Positive Definite.
Step 3 - Comment on Convexity -¶
- Since Hessian of $f(x_1, x_2, x_3)$ is Positive Definite, the function is strictly convex.
Properties of Convex functions -¶
- Constant functions of the form $f(x) = c$ are both convex and concave.
- $f(x) = x$ is both convex and concave.
- Functions of the form $f(x) = x^r$ with $r \geq 1$ are convex on the Interval $0 < x < \infty$
- Functions of the form $f(x) = x^r$ with $0 < r < 1$ are concave on the Interval $0 < x < \infty$
- The function $f(x) = \log{(x)}$ is concave on the interval $0 < x < \infty$
- The function $f(x) = e^{x}$ is convex everywhere.
- If $f(x)$ is convex, then $g(x) = cf(x)$ is also convex for any positive value of c.
- If $f(x)$ and $g(x)$ are convex then their sum $h(x) = f(x) + g(x)$ is also convex.
Final Comments -¶
- We have investigated convex functions in depth while studying different ways of proving convexity.
- In the next part of the article, we shall prove the convexity of the MSE loss function used in linear regression.
- Convex functions are easy to minimize thus resulting in its usage across research domains.
- So, the next time you want to plug in a different loss function in place of MSE while training a linear regression model, you might as well check its convexity.